-
Connect 3D scanners or Import Scan Data
Load large point cloud data from terrestrial, drone, or handheld scanners (.asc, .e57, .las, etc.)
Support for structured and unstructured data

-
Registration and Alignment
Align multiple scan sets (global or manual registration)
Merge into a single, unified dataset
-
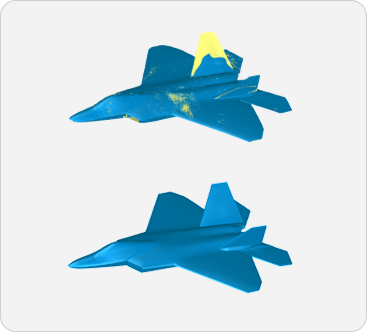
Point Cloud Clean-Up
Remove noise, outliers, and irrelevant data
Reduce point density if required
Isolate useful regions of the scan
-
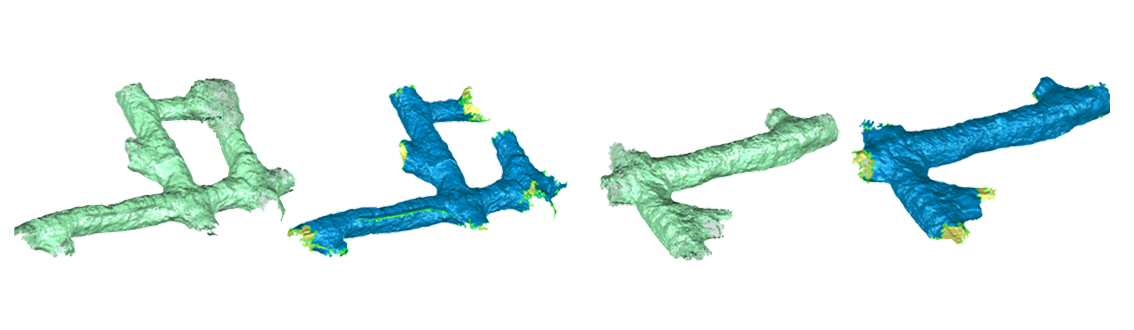
Create Polygon Mesh
Generate a triangulated mesh from the cleaned point cloud
Fill holes, refine mesh quality, and eliminate overlapping surfaces

-
Mesh Optimization
Smooth, sharpen, or decimate mesh as per your use case (e.g., 3D printing vs. CAD modeling)
-
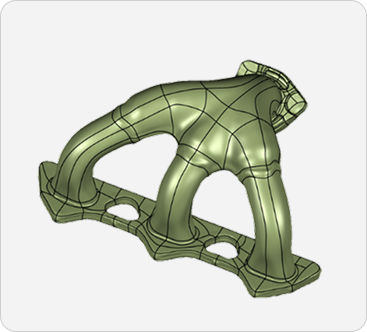
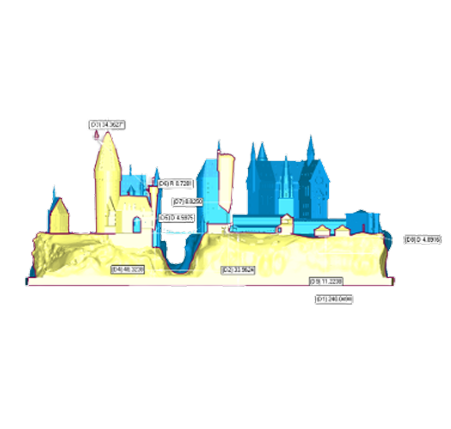
Convert to NURBS Surface (Optional)
For CAD or engineering usage, convert polygon mesh to NURBS
Export as IGES or STEP

-
Export
Export final mesh as .STL, .OBJ for
3D printing or visualisation

Export as .IGES or .STEP
for downstream CAD usage

Call us now
+91 98404 78347 | +91 7395972777
3D Point Cloud Processing Software
Point Cloud to Polygon Mesh and NURBS Surface Conversion
End-to-End Workflow from 3D Point Cloud to Mesh & NURBS Model

Email us
sm@precise3dm.com | sales@precise3dm.com

What is 3D Point Cloud Processing Software?
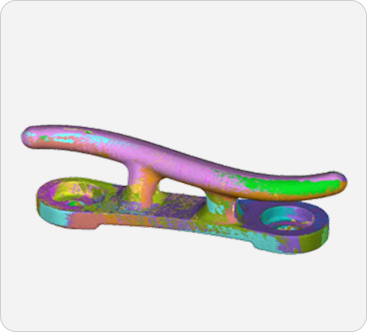
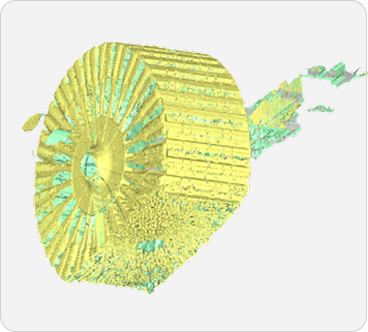
Modern 3D scanners—especially long-range Lidar or laser scanners—generate huge sets of raw point cloud data representing the physical object or space. This point cloud is essentially millions (or billions) of XYZ coordinates without any surface connectivity or mesh.
To transform this unstructured data into meaningful 3D models, you need specialized point cloud processing software to clean, process, and convert point cloud data into accurate polygon mesh or NURBS surfaces. Whether you are capturing industrial parts, terrains, monuments, or full facilities, or a movie set, Wrap provides a streamlined and efficient path from raw scan data to usable digital models.
3D Point Cloud Processing Software
We are a proud authorized distributor of Geomagic Wrap software by Hexagon, a global leader in 3D scanning and data processing. Wrap is suitable for engineers, archeologists, architects, researchers, and manufacturers who work with 3D scanned data and need to transform it into usable digital formats.
Key Features

Import large-sized Point clouds

Filter Noise and cleanup the scan data

Create High quality Mesh models

Create manual and automotive nurbs surfaces
Workflow of Geomagic Wrap – From Point Cloud to NURBS
Why You Need a Dedicated Point Cloud Software Like Geomagic Wrap
Point clouds are large and noisy. Without the right tools, it's difficult to convert
them into usable meshes or 3D files. Geomagic Wrap enables users to:
Import massive Lidar or laser scan data from terrestrial, handheld, or drone-based 3D scanners
Remove outliers and noise, and clean up irrelevant scan data
Align and merge multiple scans into one consolidated model
Convert point cloud into polygon mesh with automatic and manual control
Decimate or refine mesh density for your application
Generate watertight or optimized mesh for inspection, reverse engineering, or 3D printing
Create NURBS surfaces from polygon mesh for CAD and design workflows
Export to .STL, .OBJ, .IGES, .STEP and other industry formats
Why choose Precise3DM?
We have been a proud distributor of Geomagic software since 2015. As their Golden partners, we bring the necessary expertise to implement and successfully succeed with Geomagic software solutions. Here’s what makes us distinguished:
-
Completed over 300+ 3D scanners and Geomagic software successful installations
-
PAN-India support for installation and training
-
Offer competitive pricing, authorised licenses, and direct access to the latest updates
-
On-site consultation and live demonstrations Start a free trial today!